iLQR
- Iterative Linear Quadratic Regulator (iLQR) for non-linear trajectory optimization.
- Supports inequality constraints on control inputs or state variables via barrier functions.
- with Numba acceleration - 20x faster than native python code.
Dependencies
- sympy, numpy, numba, matplotlib
vehicle control example
Usage
from ilqr import iLQR
from ilqr.containers import Dynamics, Cost
See examples folder for more insight on how to use this repo.
Construting Dynamics
- You can either define dynamics numerically or symbolically and pass it to the ‘Dynamics Container’ class.
- Look at containers.py file in source code for more insight into construting the dynamics and cost.
Let’s consider a simple problem i.e. pushing a box to goal position from start (double integrator system). The dynamics are defined as
s" = u/mass
Finite Diff Dynamics
Partial derivatives are computed using Finite Difference approximation.
import numpy as np
from ilqr.containers import Dynamics
# params
m = 2.0 # mass
dt = 0.1 # discrete time step
#numerical function
def f(x, u):
#velocity
vel = x[1]
#acceleration
acc = u[0]/m
#construct state_dot
x_dot = np.array([vel, acc])
return x_dot
#contruct Dynamics
dynamics = Dynamics.Continuous(f, dt)
Symbolic Dynamics
Partial derivatives are computed symbolically using sympy and compiled with Numba.
import sympy as sp
from ilqr.utils import GetSyms
from ilqr.containers import Dynamics
#state and action dimensions
n_x = 2
n_u = 1
#params
m = 2.0
dt = 0.1
#Get Symbolic variables
x, u = GetSyms(n_x, n_u)
#Construct Discrete dynamics
x_n = x + sp.Matrix([x[1], u[0]/m])*dt
dynamics = Dynamics.SymDiscrete(x_n, x, u)
Note: You can also directly construct dynamics by hard coding the partial derivaties and wrapping them with numba.jit decorator.
def f(x, u): ...
def f_x(x, u): ...
def f_u(x, u): ...
dynamics = Dynamics(f, f_x, f_u)
usage
>>> dynamics.f(x0, u0)
>>> dynamics.f_x(x0, u0)
>>> dynamics.f_u(x0, u0)
Construting Cost
- Similar to the dynamics, the partial derivates of the cost functions are computed by the ‘Cost Container’.
- They can also be specified directly as shown above.
Let’s construct a simple cost to penalise the box for staying away from goal (i.e S = 10m).
Simple cost
import sympy as sp
from ilqr.utils import GetSyms
from ilqr.containers import Cost
x, u = GetSyms(n_x, n_u)
#displacement and velocity
s, v = x
#Terminal cost
Lf = 10*(s - 10)**2
#Running cost
L = (s - 10)**2 + 0.1*v**2 + 0.1*u[0]**2
#construct cost
cost = Cost.Symbolic(L, Lf, x, u)
Note: Currently only Symbolic costs are supported
Constrain control input or state variable
- Logarithmic and Exponential barrier functions are implemented for adding inequality constraints as cost. Look at utils.py file for more info.
from ilqr.utils import Bounded
L = (s - 10)**2 + 0.1*v**2
#Running cost with constraint on applied force (2N to -2N)
L += Bounded(u, high = [2], low = [-2])
#construct cost
cost = Cost.Symbolic(L, Lf, x, u)
Quadratic Cost
import numpy as np
import sympy as sp
from ilqr.utils import GetSyms, Bounded
from ilqr.containers import Cost
x_goal = np.array([10, 0])
Q = np.diag([1, 0.1])
R = np.diag([0.1])
QT = np.diag([10, 10])
#construct Quadratic Cost
cost = Cost.QR(Q, R, QT, x_goal)
#Add constraints on Force (2N to -2N)
cons = Bounded(u, high = [2], low = [-2])
#construct Quadratic cost with constraints
cost = Cost.QR(Q, R, QT, x_goal, cons)
usage
>>> cost.L(x0, u0)
>>> cost.L_x(x0, u0)
>>> cost.L_ux(x0, u0)
.
.
>>> cost.Lf(x0)
>>> cost.Lf_xx(x0)
iLQR
from ilqr import iLQR
controller = iLQR(dynamics, cost)
#initial state
x0 = np.array([0, 0])
#initil guess
us_init = np.random.randn(N, n_u)*0.01
#run optimization
xs, us, cost_trace = controller.fit(x0, us_init)
Note: The first run is slower since numba has to compile the functions. Some parameters of iLQR controller can customised as per your needs (Look at the code for more info)
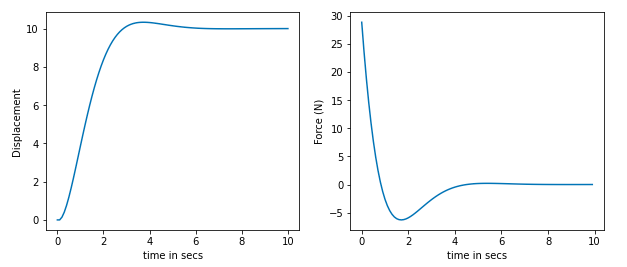
Let’s look at the results
Displacement and Force applied with out constraint on force.
Displacement and Force applied with constraint on force.
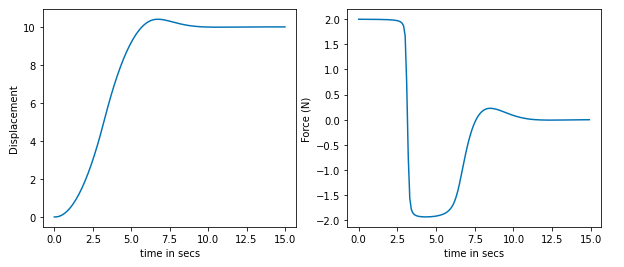
You can see that the force does not cross the 2N limit.
Model Predictive Control (MPC)
from ilqr.controller import MPC
mpc = MPC(controller, control_horizon = 1)
#initial state
x0 = np.array([0, 0])
#Prediction Horizon
N = 50
#Initil guess
us_init = np.random.randn(N, n_u)*0.01
mpc.set_initial(us_init)
#get optimal action
us = mpc.control(x0)
#after observing next state
us = mpc.control(x_next)
Future Work
- Add support to work with a differentiable physics simulator like Brax
- Support for cost to follow given trajectory